Egg-Bot: Unterschied zwischen den Versionen
Aus Hackerspace Ffm
Axl (Diskussion | Beiträge) (→10.3.2012: + Egg-Bot Y-Motor plate) |
Axl (Diskussion | Beiträge) (→17.3.2012: + 22.3.2012) |
||
| Zeile 104: | Zeile 104: | ||
Datei:Egg-Bot 026 Y-Motor Plate IMG 1867.JPG|Kabelschellen Montage | Datei:Egg-Bot 026 Y-Motor Plate IMG 1867.JPG|Kabelschellen Montage | ||
Datei:Egg-Bot 025 Counter-weight IMG 1868.JPG|Arm Gegengewicht | Datei:Egg-Bot 025 Counter-weight IMG 1868.JPG|Arm Gegengewicht | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | |||
| + | |||
| + | === 22.3.2012 === | ||
| + | * Ein neuer Arm - näher am Egg-Bot Original | ||
| + | ** der Arm mit Parallel-Führung schwingt start, vermutlich zu hohes Eigengewicht | ||
| + | * Gelenk über Folie | ||
| + | ** bisher ohne Servo | ||
| + | |||
| + | <gallery caption="Arm" perrow=5> | ||
| + | Datei:Egg-Bot 030 new arm IMG 1872.JPG|Neuer Arm | ||
| + | Datei:Egg-Bot 030 new arm IMG 1873.JPG|Neuer Arm | ||
| + | Datei:Egg-Bot 030 new arm IMG 1874.JPG|Neuer Arm | ||
</gallery> | </gallery> | ||
<br><br> | <br><br> | ||
Version vom 25. März 2012, 08:23 Uhr

Inhaltsverzeichnis
Egg-Bot - Easter Edition 2012
Egg-Bot Ideen & Prototyp

Egg-Bot Prototypen
- Prototypen-Bau
- Stepper: Typ Moons Hybride Bipolar Stepping Motor 14HY7002-06 1.8 Deg - z.B. bei Pollin
| Pin | Bedeutung | Kabelfarbe |
|---|---|---|
| 1 | 1B | grün |
| 3 | 1A | schwarz |
| 4 | 2A | blau |
| 6 | 2B | rot |
- Eggbot Prototypen

Prototyp #1 - Stepper

Egg-Bot Prototypes

Egg-Bot Prototypes

Egg-Bot Prototypes

Milling...

Stepper-Test
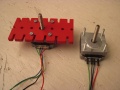
Stepper-Pin-Belegung

Prototyp #2

Prototyp #2

Prototyp #2

Motor und Gegenlager

Ei-Halter Gegenlager

Prototpy Playground
-1280.jpg)
-1280.jpg)










Egg-Bot Prototyp EB#2
- Arduino-Control mit g-Code Interpreter
- X-Achse: 36 mm == 360° == 1 Umdrehung - Stepper "MOONS", NEMA 14 (400 mA)
- Y-Achse: 12 mm == 120° Winkel des Arms - Stepper von Waterod, NEMA 14
- Toolchain: InkScape (36 x 12 mm] --> pyCAM --> Processing sertalk Kommunikation mit COMxx
- Eggbot Prototyp EB#2

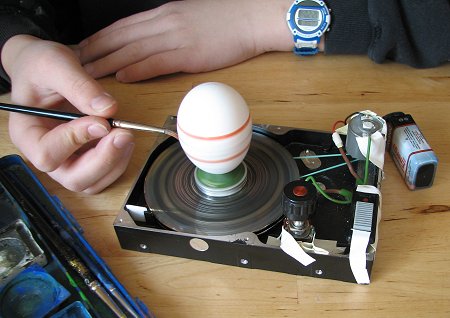
EB#2 Setup

EB#2 tut was

EB#2 tut was

Gib mit ein E

Egg-Bot Schild





3.3.2012
- Stärkerer Stepper NEMA 14, um die Kräfte am Arm besser auszugleichen
- Parallelführung am Arm Verbesserung der Zeichen-Genauigkeit

Genauigkeit steigt

Ein neuer Arm

Stärkerer Stepper für ...

... neuen Arm mit ...

Parallel-Führung





7.3.2012
- Arm-Prototyp durch Eigenkonstruktion mit T8L bone vertexes ersetzt
- Test mit Gegengewicht - Danke für den Tipp, Yag-freak

Parallel-Führung

EB#2 Tests

EB#2 Gegengewicht



10.3.2012
- Arm: Abstände in Parallel-Führung vergrößert für mehr Präzision
- T88L-Vertex für Servo gefräst und eingesetzt
- Servo zum Anheben des Stiftes montiert
- Software angepaßt: g-Codes mit Z-Koordinaten > 0 heben Stift an. Z <= 0 senkt Stift ab.
- Stabileres Gegengewicht

Neue Parallel-Führung

Servo für Z-Achse

Servo & T88L

Bot-Ei :-)




17.3.2012
- Egg-Bot Y-Motor plate
- Ersatz für ein Fischertechnik© Teil im Prototyp
- 9 mm Multiplex Sperrholz
- Aufnahme für NEMA 14 Stepper mit versenktem Lagerblock und 12 mm Langlöchern
- Schlitze zur Führung auf dem Egg-Bot Rahmen
- Egg-Bot Y-Motor plate

Versenkter Lagerblock

Langlöcher

Kabelschellen Montage

Arm Gegengewicht




22.3.2012
- Ein neuer Arm - näher am Egg-Bot Original
- der Arm mit Parallel-Führung schwingt start, vermutlich zu hohes Eigengewicht
- Gelenk über Folie
- bisher ohne Servo
- Arm

Neuer Arm

Neuer Arm

Neuer Arm



Links & more infos
Original Egg-Bot und Varianten
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/malma.JPG
- http://produkte.schlecker.com/brauns-heitmann-ostereier-anmal-geraet-927235001
- http://www.auvito.de/eier-malmaschine-aus-holz/artnr13775881/details.html
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/Bfix.JPG
- http://www.b-kainka.de/bast127.jpg
- http://www.flickr.com/photos/38027676@N04/with/3496234785/
- http://www.regio-tv.de/video/130141.html
{kind=link}
{kind=link}
{kind=link}
Stifte - lebensmittelecht
- Edding 1350 Egg Color Pen - Fasermaler Lebensmittelfarbe [1]
- http://www.edumero.de/ostereier-filzstifte.html
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/stifte.JPG
- http://www.ks-versand.de/pi32/pd146.html
{kind=link}
Anderes